DATE Initiative on
Autonomous Systems Design
12-13 March 2020
Grenoble, France

Vue sur l'agglomération Grenobloise depuis le sommet du Moucherotte (1901 m). Vue sur les massifs de Chartreuse, du Mont Blanc, de Belledonne et des Grandes Rousses., by Bertrand93, under Creative Commons license.
_final.JPG){kind=link}

Ipad, location, icon and car, by Rawpixel, under Creative Commons license.

Driver with Apple Watch, by Luca Bravo, under Creative Commons license.

Teleferic of Grenoble, by Jörg Sancho Pernas, under Creative Commons license.
{kind=link}

Which Way?, by Nick Fewings, under Creative Commons license.
Light trails in front of Volkswagen Beetle, by Matthew Szlichta, under Creative Commons license.
Phoenix Park Monument Roundabout, by Lucas Miguel, under Creative Commons license.

Kyoto Photo, by Victoriano Izquierdo, under Creative Commons license.
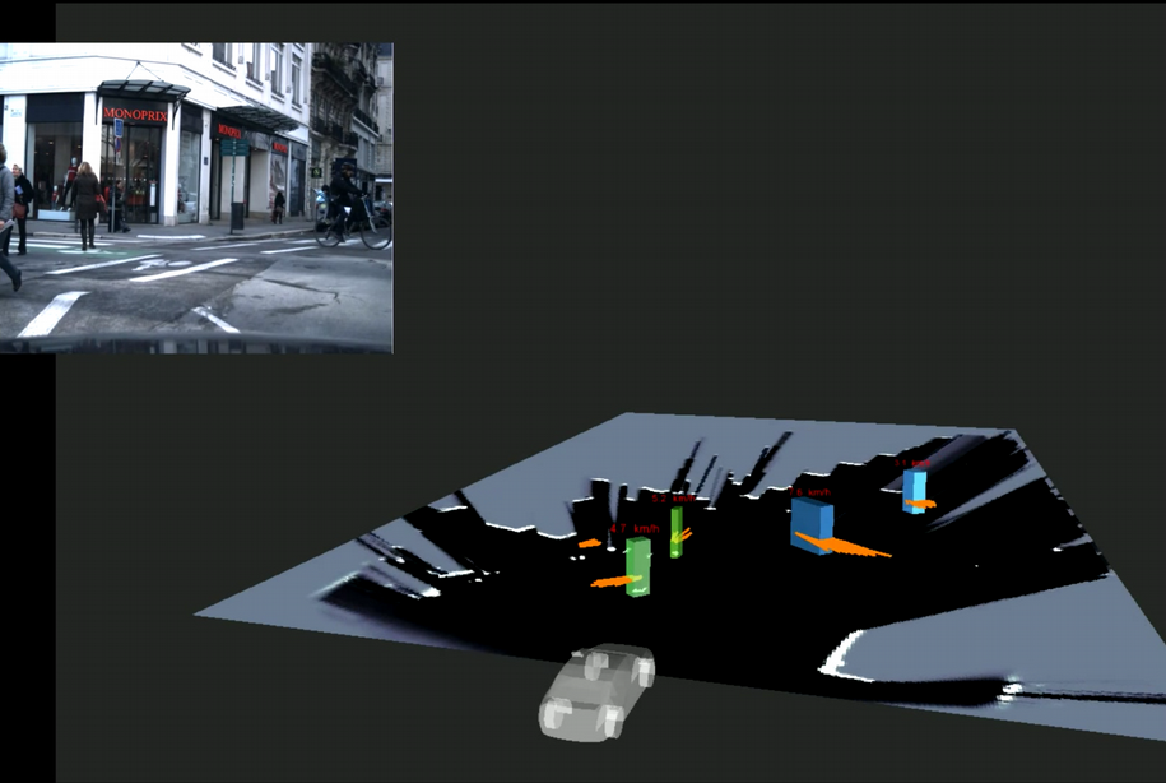
Inria Autonomous Driving Demonstration: Focus on the Embedded Bayesian Perception System
L. Rummelhard, J.A. David, J. Lussereau, T. Genevois, C. Laugier
Perception framework
CMCDOT is a Bayesian filtering system for dynamic occupation grids, allowing parallel estimation of occupation probabilities for each cell of a grid, inference of velocities, prediction of the risk of collision and association of cells belonging to the same dynamic object. It takes as input instantaneous occupation grids generated by sensor models for different sources (Lidars, stereo cameras, ...). The core of the application is implemented on GPU Nvidia (Cuda), allowing real-time analysis of the local vehicle environment on embedded boards (Tegra X2).
Experimental set up & Demonstration
The experimental platform is an electric Renault Zoe car, which has been transformed to be autonomous. It can be programmed, driven manually or driven manually with advanced driving assistance functionalities. It is equipped with lidars, camera and IMU. The projection of the car’s trajectory onto a dynamic occupancy grid computed by the CMCDOT allows the system to continuously estimate in real time the collision risk associated to each possible driving command, and then to drive the car safely. Relying on this, the demonstration consists in driving autonomously the car along a given path in a map, while avoiding dangerous static and dynamic obstacles perceived by the onboard sensors.

References
- Lukas Rummelhard, Amaury Negre, Christian Laugier. Conditional Monte Carlo Dense Occupancy Tracker. 18th IEEE International Conference on Intelligent Transportation Systems, Sep 2015, Las Palmas, Spain. hal-01205298v1
- Lukas Rummelhard, Amaury Nègre, Anshul Paigwar, Christian Laugier. Ground Estimation and Point Cloud Segmentation using SpatioTemporal Conditional Random Field. IEEE Intelligent Vehicles Symposium (IV), Jun 2017, Redondo Beach, USA. hal-01579095v1
- Lukas Rummelhard, Christian Laugier. Embedded Bayesian Perception by Dynamic Occupancy Grid Filtering. GTC 2017 - GPU Technology Conference, May 2017, San Jose, California, United States. hal-01672134v1
- Lukas Rummelhard, Jerome Lussereau, Jean-Alix David, Christian Laugier, Salvador Dominguez et al. Perception and Automation for Intelligent Mobility in Dynamic Environments. IEEE ICRA 2017, Workshop on Robotics and Vehicular Technologies for Self-driving cars, June 2017, Singapore. hal-01592566v1
- Christian Laugier. Embedded Bayesian Perception and Collision Risk Assessment (invited talk). IEEE ICRA 2017, Workshop on Robotics and Vehicular Technologies for Self-Driving Cars, Jun 2017, Singapore. hal-01592566v1